|
|
|||||||||||||||||
作為港口、電力、冶金等行業(yè)重要的散料裝卸機械,斗輪堆取料機操作目前還以人工操作為主,不僅具有工作環(huán)境惡劣、安全性低、準(zhǔn)確性差、運行成本高等缺陷,同時作為重要的基礎(chǔ)終端機械,因其人工操作形成的“信息孤島”,極大的阻礙了智能燃料系統(tǒng)以及智能港口、智慧工廠的建設(shè)升級。
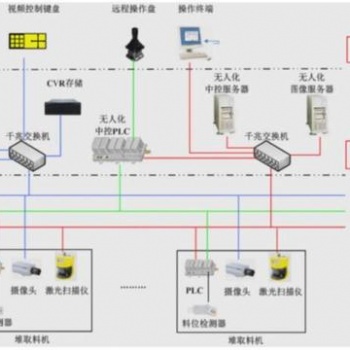
正向科技利用自動控制技術(shù)、格雷母線**定位技術(shù)、激光三維掃描技術(shù)、圖像監(jiān)控技術(shù)、安全防范技術(shù)等手段,自主設(shè)計開發(fā)了智能堆取料無人作業(yè)系統(tǒng),融合了基于數(shù)學(xué)模擬建模技術(shù)與快速激光掃描建模技術(shù),通過料堆三維模型坐標(biāo)數(shù)據(jù),精準(zhǔn)下刀作業(yè)。
結(jié)合無線通訊與控制技術(shù),利用高精度定位系統(tǒng)、料位雷達、防碰撞雷達、微波開關(guān)防碰撞系統(tǒng),通過遠程視頻監(jiān)控系統(tǒng)及空間防碰撞系統(tǒng),對料堆三維圖形和數(shù)據(jù)進行分析。
結(jié)合料場操作作業(yè)工藝控制策略,開發(fā)自動堆料取料執(zhí)行控制程序,從而實現(xiàn)全天候的堆取料遠程控制,與全自動無人作業(yè),實現(xiàn)堆取料作業(yè)生產(chǎn)管理與操作作業(yè)的標(biāo)準(zhǔn)化、自動化。
系統(tǒng)實現(xiàn)全天候、主動安全防護的全自動化作業(yè),有效解決散貨料場堆取料作業(yè)存在的作業(yè)要求高、勞動強度大、操作員健康與安全隱患、流程效率較低、信息化手段較低等主要問題,提高料場生產(chǎn)組織與管理水平,實現(xiàn)全天候煤場斗輪機的遠程全自動控制,有效解決手動操作效率低下及惡劣環(huán)境帶來的諸多問題,大大提升設(shè)備運行的安全性和經(jīng)濟性。
|
